ASSANet: An Anisotropic Separable Set Abstraction for Efficient Point Cloud Representation Learning
Abstract
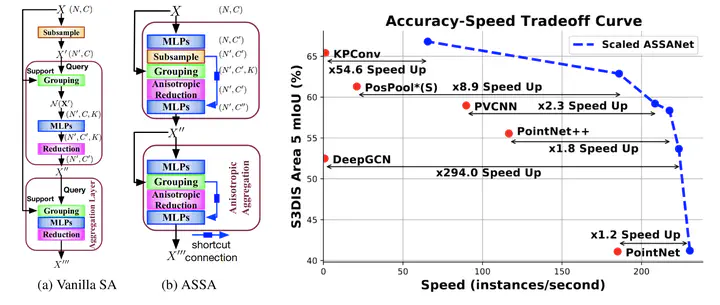
Access to 3D point cloud representations has been widely facilitated by LiDAR sensors embedded in various mobile devices. This has led to an emerging need for fast and accurate point cloud processing techniques. In this paper, we revisit and dive deeper into PointNet++, one of the most influential yet under-explored networks, and develop faster and more accurate variants of the model. We first present a novel Separable Set Abstraction (SA) module that disentangles the vanilla SA module used in PointNet++ into two separate learning stages (1) learning channel correlation and (2) learning spatial correlation. The Separable SA module is significantly faster than the vanilla version, yet it achieves comparable performance. We then introduce a new Anisotropic Reduction function into our Separable SA module and propose an Anisotropic Separable SA (ASSA) module that substantially increases the network’s accuracy. We later replace the vanilla SA modules in PointNet++ with the proposed ASSA modules, and denote the modified network as ASSANet. Extensive experiments on point cloud classification, semantic segmentation, and part segmentation show that ASSANet outperforms PointNet++ and other methods, achieving much higher accuracy and faster speeds. In particular, ASSANet outperforms PointNet++ by 7.4 mIoU on S3DIS Area 5, while maintaining 1.6 × faster inference speed on a single NVIDIA 2080Ti GPU. Our scaled ASSANet variant achieves 66.8 mIoU and outperforms KPConv, while being more than 54 × faster.
Hasan Abed Al Kader Hammoud
PhD Student
Hasan is an Electrical and Computer Engineering Ph.D. student in Image and Video Understanding Lab (IVUL) Group in the Artificial Intelligence Initiative (AII) at King Abdullah University of Science and Technology (KAUST) under the supervision of Professor Bernard Ghanem.